速度監視用セーフティリレーユニット『PSR-MM30』のSensor diagnosis/不一致監視について
Sensor diagnosis/不一致監視
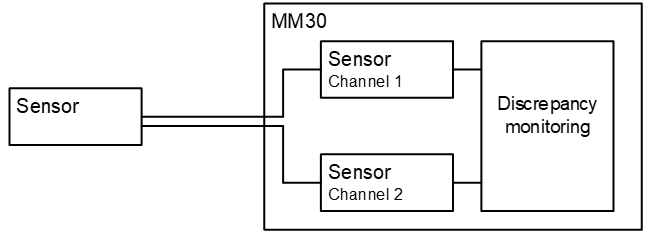
速度検知用セーフティリレーユニットであるPSR-MM30の測定システムは、センサ信号(近接スイッチまたは
エンコーダ)を内部で2つのチャネルで評価します。
測定システムは、測定信号の不一致監視を実行します。
簡略化すると、次のようになります。
ゼロ速度監視のパラメータ値を超えると、測定システムは測定信号が互いに30%ずれることを許容します。
最高周波数の測定信号は、安全機能を実行するための決定的な要因となります。
PSR-MM30の設定ツール内には、「Sensor diagnosis」という項目があり、それらを変更することができます。
設定例1
設定値
Sensor diagnosis: 1
zero-speed monitoring: 10 Hz
over-speed monitoring: 100 Hz
測定値(MM30)
Channel 1: 20 Hz
Channel 2: 22 Hz
結果
Channel 1とChannel 2の不一致は10%です。障害はなく、システムは正常に動作します。
設定例2
設定値
Sensor diagnosis: 1
zero-speed monitoring: 10 Hz
over-speed monitoring: 100 Hz
測定値(MM30)
Channel 1: 20 Hz
Channel 2: 28 Hz
結果
Channel 1とChannel 2の不一致は40%です。MM30 は測定信号の不一致エラー (<30%) を検出し、
安全機能を作動させます。
測定システムでの強い振動により、単一チャネルの高周波が発生する可能性があります。
システムの可用性を高めるために、「Sensor diagnosis」選択領域に、アプリケーション固有の
センサー不一致の許容係数を入力します。
センサー診断のこの係数により、不一致監視をアクティブ化するしきい値が上がります。
このように、セーフティリレーユニットは、zero-speed monitoringのパラメーター化された値を超えても、
30% を超える測定信号間の不一致を許容します。
設定例3
設定値
Sensor diagnosis: 3
zero-speed monitoring: 10 Hz
over-speed monitoring: 100 Hz
測定値(MM30)
Channel 1: 20 Hz
Channel 2: 28 Hz
結果
Channel 1とChannel 2の不一致は40%(設定例2と同様)ですが、システムは障害なく正常に動作します。
その理由は、測定された周波数が 30 Hz 未満であるため、不一致監視がオフ/非アクティブになっているためです。
(不一致監視をアクティブにするための計算を参照)。
不一致監視をアクティブ化するためのしきい値
= Sensor diagnosisの係数 × zero-speed monitoringのパラメータ化された値
= 3 × 10 Hz = 30 Hz
設定されたセンサ診断係数に関係なく、2つのチャネルのうちの1つが設定されたover-speed周波数を超えると、
安全機能が作動します。
設定例4
設定値
Sensor diagnosis: 20(これは、不一致監視が200Hzからのみアクティブになることを意味します。)
zero-speed monitoring: 10 Hz
over-speed monitoring: 100 Hz
測定値(MM30)
Channel 1: 20 Hz
Channel 2: 110 Hz
結果
安全機能は、2つのチャネルのうちの1つが設定されたover-speed周波数を超えると、作動します。
(ただし、不一致監視は非アクティブです。)
※ 速度監視用セーフティリレーユニットPSR-MM30については記事「停止とオーバースピードを検知する セーフティリレーユニット PSR-MM30 のご紹介」をご覧ください。
※ 回転監視リレーユニット「PSRmotion」シリーズの適切な機種選定については記事「どれを選べばいい? セーフティ回転監視(停止/オーバースピード)の選定」をご覧ください。